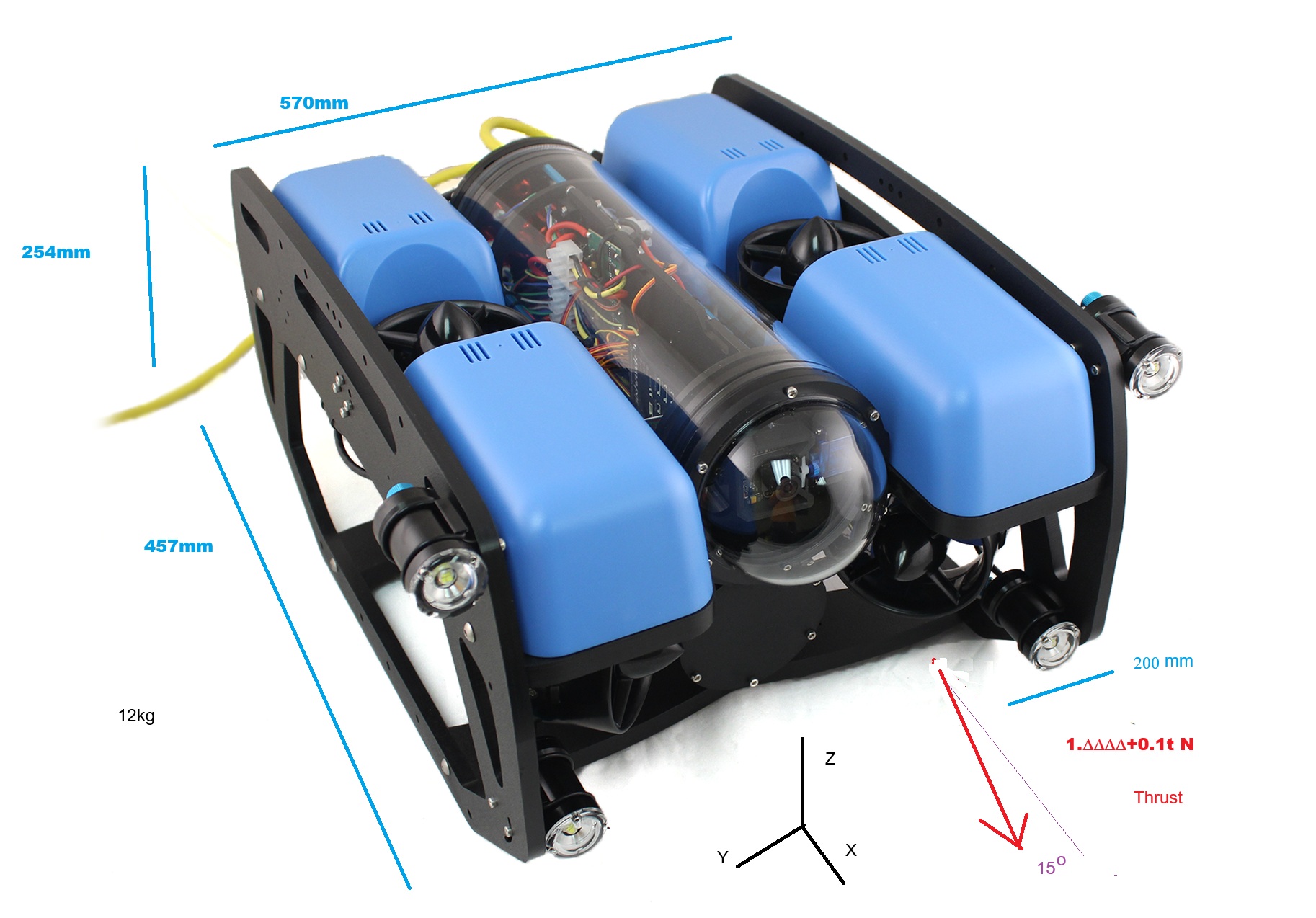
The Blue Robotics BlueROV2 (currently used in the RWU/UMass Lowell Autonomous underwater vehicle project) can be considered neutrally boyant, meaning no net force in the Z direction shown. Although not at all the case, for first cut analysis consider the ROV a cube of uniform material with mass of 12kg and the dimensions shown in blue. Pushing water backwards, the thrusters produce a net force shown that does not pass through the center of gravity, so the ROV will tend to rotate as it moves forward. Presume the thrust is at the center of gravity in the Z-direction, thus permitting ignoring of Z-direction in the problem. The thrust vector is angled 15deg from the X-direction and 200mm from the left front of the ROV. Determine the linear X- and Y- direction velocities and angular velocity about the Z-axis after 1.13 seconds of thrust.