Dr. Matthew Stein
 |
That is Mt. Fuji and my daughter Tara in 2015. |
ENGR220 Dynamics Homework Problems
In Fall 2022 I was a visiting researcher at LS2N Laboratoire des Sciences du Numérique de Nantes as a sabbatical project. During this visit I worked on developing a Gazebo model of a 2R robot. I created the techical report 2R Robot Model Technical Report. The report is made availabe in the hopes that it might be useful.
In June 2017 I was a visiting researcher at LS2N Laboratoire des Sciences du Numérique de Nantes (transformed from the IRCCYN refenced below) as part of the European Master on Advanced RObotics (EMARO) program. During this visit I worked on ROS Navigation Stack and the Turtlebot equipped with LiDAR. To assist future students in creating a SLAM map and autonomously navigating using the map, I created the techical report Map Building And Autonomous Navigation Using The ROS Navigation Stack And The Turtlebot. The report is made availabe in the hopes that it might be useful.
In July 2014 I was a visiting researcher at Le Institut de Recherche en Communications et en Cybernétique de Nantes as part of the European Master on Advanced RObotics (EMARO) program. During this visit I worked with the Baxter Robot and the ROS operating system. View the technical report and the video demonstration of Baxter using visual servoing to grasp a beverage dispenser.

I was on sabbatical Spring 2010 at Le Institut de Recherche en Communications et en Cybernétique de Nantes as a visiting professor in the European Master on Advanced RObotics (EMARO). We documented our India trip on our trip blog: Stein Family Trip
Research Activities
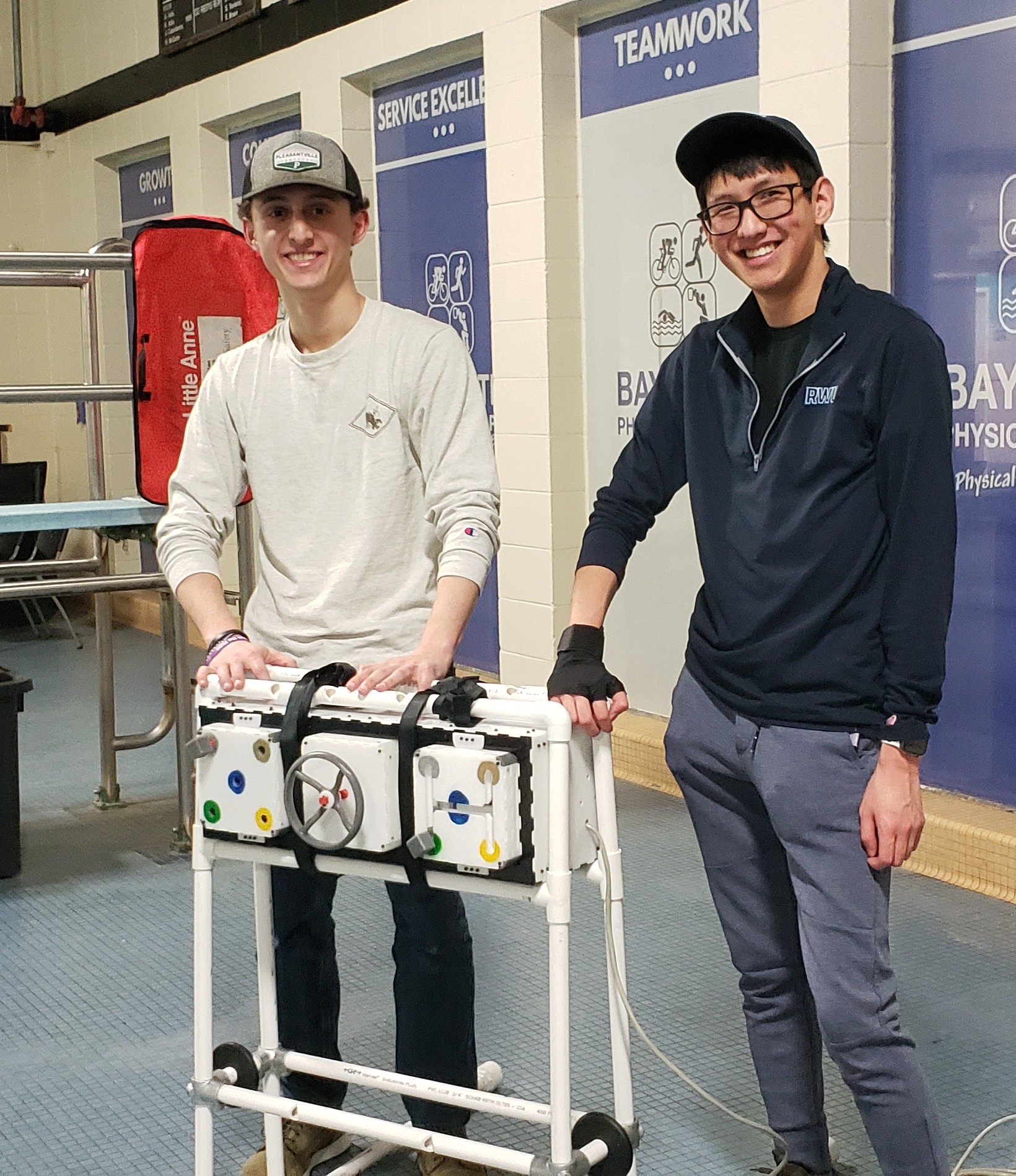
Office of Naval Research (ONR) Autonomous Underwater Robot is a joint research project of University of Massachusetts Lowell, (UML) , Naval Underwater Research Center (NUWC) and Brown University. Roger Williams University is a sub-award to Brown University employing two undergraduate students under the supervision of Matthew Stein. Our project is to create an sensorized test stand for manipulation by an autonomous underwater robot. The test will hang underwater in a test pool and report the status of the experimental tasks in real time.
Summer 2012: Advance Modeling of a Skid-Steering Mobile Robot for Remote Telepresence by Stefano Mafrica. Stefano is a student at the University of Genoa who came to RWU to work as part of a student exchange agreement. Mariella Buttaci also participated in this program but her thesis is as of yet unpublished.

Roger Williams University Publications
- Combatting Ad Hoc Fabrication in a Senior Level Mechatronics Course. Matthew Stein. American Society of Engineering Education New England Section Annual Meeting, April 29th, 2016. University of Rhode Island.
- Numerical Simulation as in Integral Component of Dynamics Problem Solving. Matthew Stein. Transactions on Techniques in STEM Education. Vol 1, No 2. Pg 92. January 2016.
- Numerical Simulation as in Integral Component of Dynamics Problem Solving by Matthew Stein. Proceedings of the ASME 2014 International Mechanical Engineering Congress & Exposition. IMECE2014 November 8-13, 2014, Montreal, Quebec, Canada IMECE2014-37472
- The PumaPaint Project: Site Experiences and the Move to Three Dimensions and Matthew R. Stein. The 2005 International Conference on Robotics and Automation, Barcelona, Spain 2005.
- A ROBOTIC DEVICE FOR THREE-DIMENSIONAL MANIPULATION OVER THE INTERNET by Christopher Madden and Matthew Stein. Proceedings of DETC04: 28th Biennial Mechanisms and Robotics Conference September 28 - October 2 Salt Lake City, Utah.
- Design Of A New PumaPaint Interface And Its Use in One Year of Operation by Michael Coristine and Matthew R. Stein. The 2004 International Conference on Robotics and Automation New Orleans, LA May 2004. View the PDF file. PowerPoint Slides.
- RWRCCL: A New RCCL Implementation Using Real-Time Linux And A Single CPU by Matthew R. Stein. This paper describes a robot control system for PUMA robots that I am offering free. Although it was rejected from the 2004 International Conference on Robotics and Automation, it may be interesting to anyone trying to operate an old PUMA using a newer computer. View the PDF file.
- The PumaPaint Project (PDF). Journal of Autonomous Robots 15,255-265, 2003. Most comprehensive paper on the PumaPaint project.
- Chapter 16: One Year of Puma Painting in Beyond Webcams: An Introduction to Online Robots edited by Ken Goldberg and Roland Siegwart. MIT Press. 2001
- Our Attempt at a Freshman Engineering Course. Matthew Stein. American Society of Engineering Education New England Section Annual Meeting, April 29th, 2000. UMass Lowell.
- Our Second Attempt at a Freshman Engineering Course. Matthew Stein. American Society of Engineering Education New England Section Annual Meeting, April 20th, 2001. Roger Williams University.
- Hybrid Systems for Telepresence: Experimental Platform Design. Matthew Stein and Miloš Žefran. Telemanipulation and Telepresence Technologies VIII. SPIE Conference, Newton, MA October, 2001.
- Sharing Resources Over The Internet For Robotics Education. Interesting project with Karen Sutherland from UW - La Crosse (at the time). 1999
